説明
Milesight UG6X/UG56ゲートウェイは内蔵Node-Redをサポートしています。このNode-Redサンプルは、Node-Redを使用してSMSアラームをトリガーするソリューションを提供します。具体的には、EM300の温度が26°Cを超えた際にSMSアラームをトリガーする例を示します。
要件
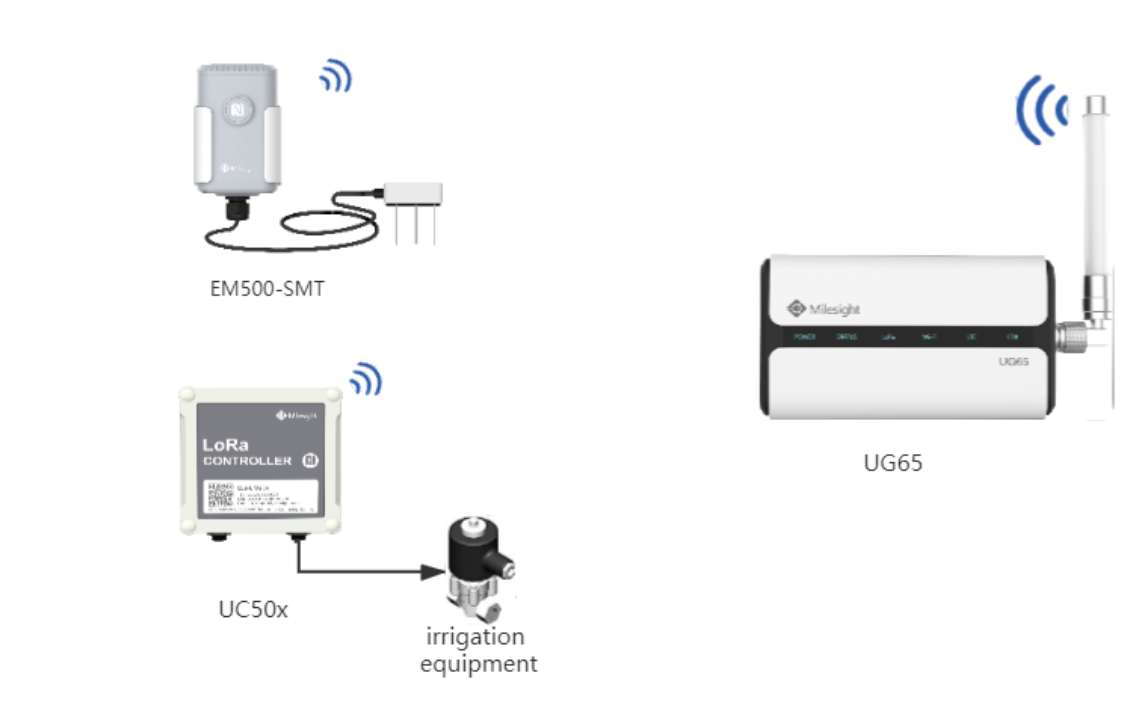
- Milesightゲートウェイ (セルラーモジュール搭載モデル):UG56/UG65/UG67
- LoRaWANセンサー
- SIMカードと携帯電話
設定
ステップ1:セルラー状態の確認
ゲートウェイにSIMカードを挿入します。Network>Interface>Cellularに移動し、必要なパラメータを設定します。ゲートウェイに挿入したSIMカードの地域別SMSセンター番号を入力してください(注:これはSIMカードの電話番号ではありません) 。現在使用中のSIMカードのSMSセンター番号はオンラインで検索するか、通信事業者にお問い合わせください。

セルラーを接続状態に保ってください。

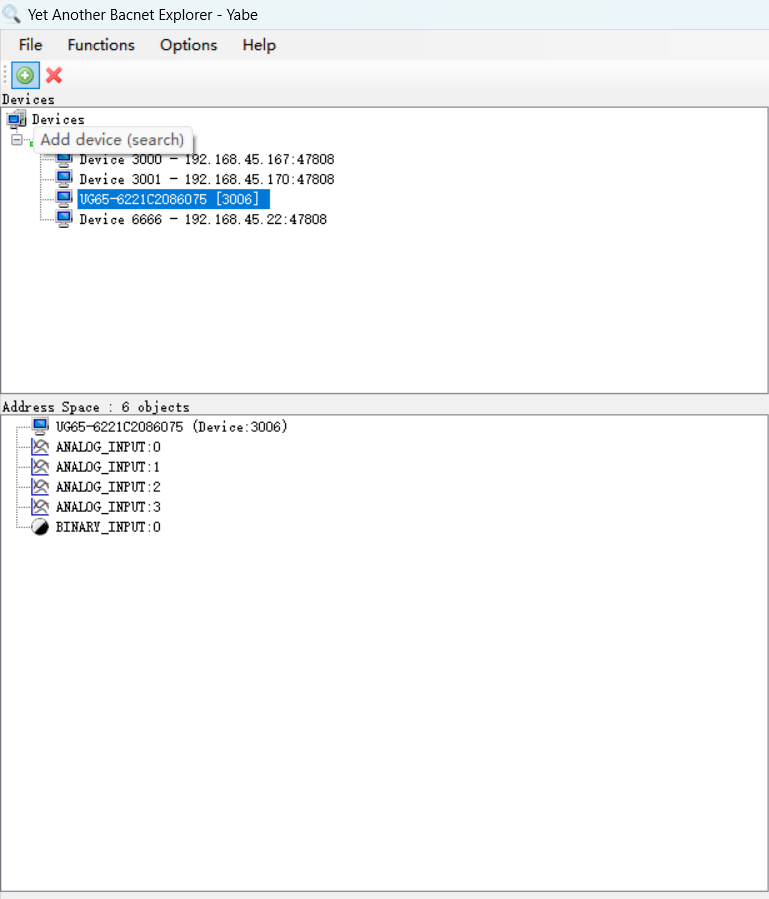
ステップ2:LoRaWANセンサーをゲートウェイに接続
LoRaWANノードをMilesightゲートウェイに接続する方法については、こちらの記事をご参照ください:

ステップ3: Node-REDを起動しフロー例をインポート
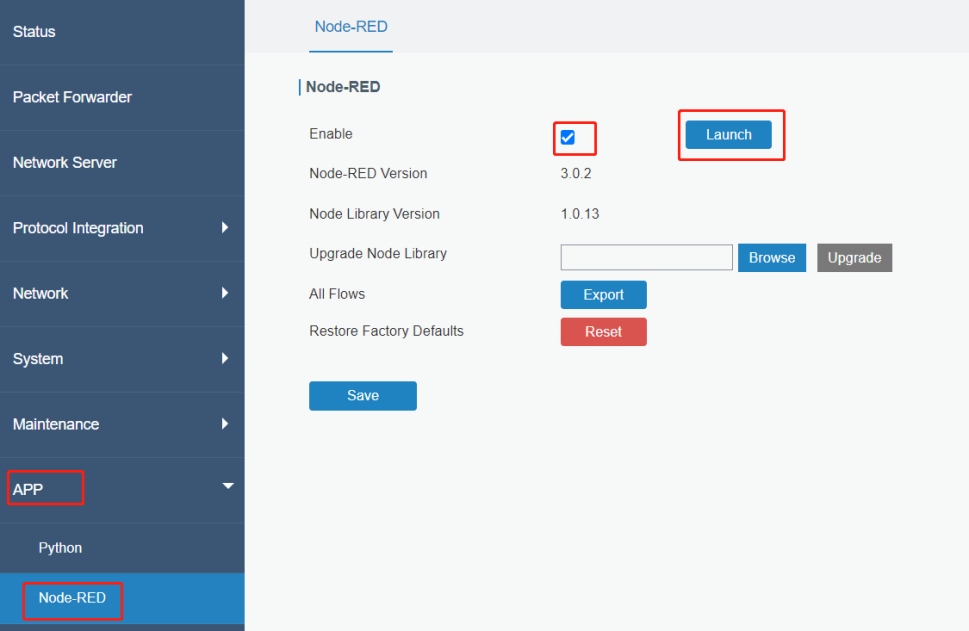
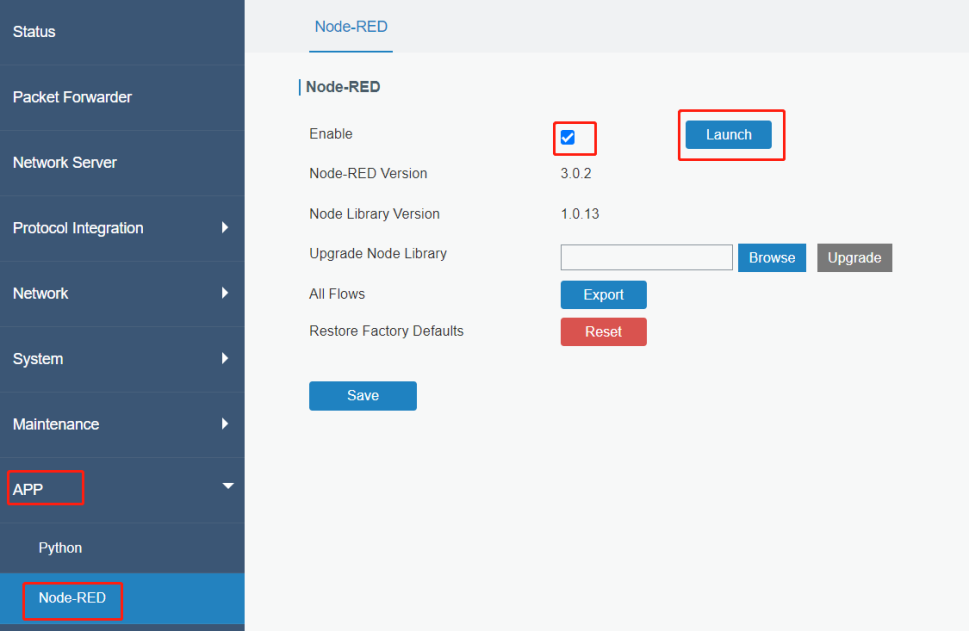
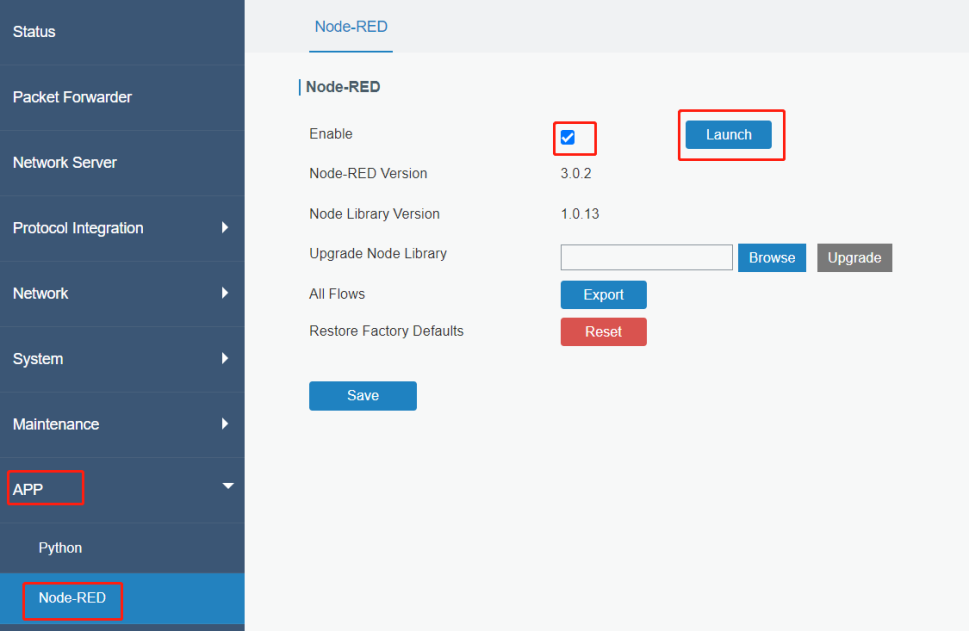
1. App > Node-RED ページに移動し、Node-REDプログラムを有効化します。プログラムの読み込みが完了するまでしばらく待ち、Launch ボタンをクリックしてNode-RED Web GUIを起動します。

2. Node-RED Web GUIにログインします。アカウント情報はゲートウェイWeb GUIと同じです。

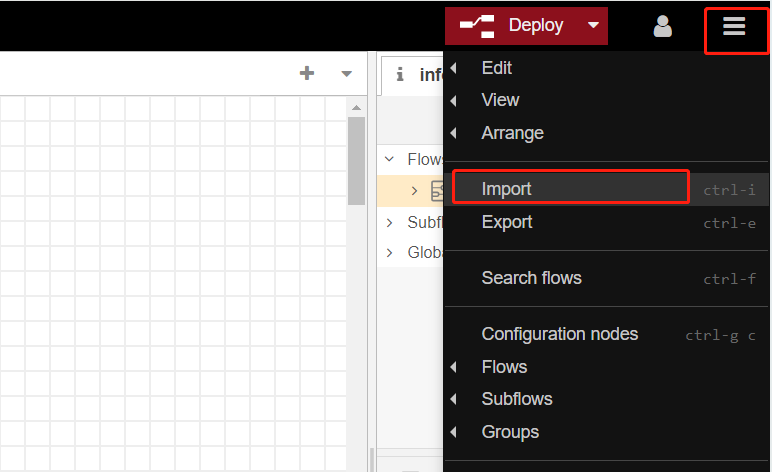
3. Import をクリックし、内容を貼り付けるかjson形式のファイルをインポートしてNode-REDフロー例をインポートします。


ステップ4: Node-RED設定
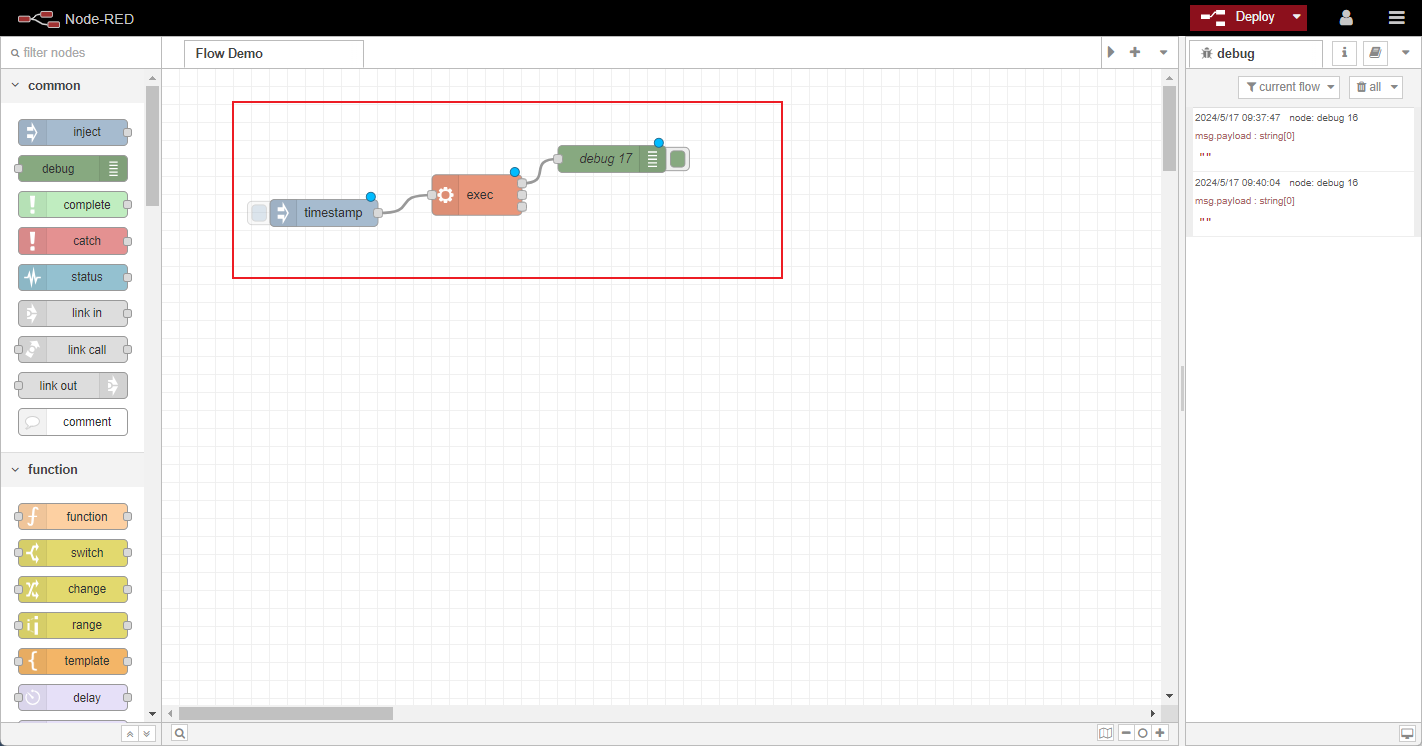
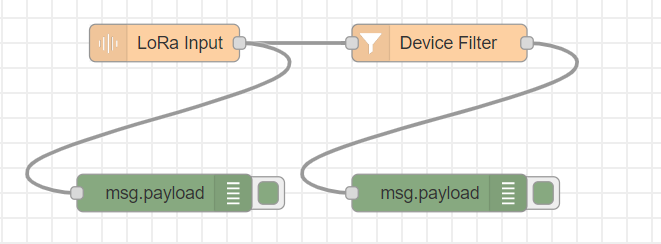
フロー構造:

Content:
[{"id":"8208c83dd9c34e3a","type":"tab","label":"流程 1","disabled":false,"info":"","env":[]},{"id":"58aad37bb390d15b","type":"LoRa Input","z":"8208c83dd9c34e3a","name":"","devEUI":"","extendedField":"","x":80,"y":280,"wires":[["af99ce753bad9c95"]]},{"id":"af99ce753bad9c95","type":"Device Filter","z":"8208c83dd9c34e3a","name":"WT101","eui":"24E124714E287260","x":240,"y":280,"wires":[["59284890e5bab55e"]]},{"id":"1a4677d654fcebcf","type":"switch","z":"8208c83dd9c34e3a","name":"","property":"payload.temperature","propertyType":"msg","rules":[{"t":"gt","v":"25","vt":"num"}],"checkall":"true","repair":false,"outputs":1,"x":630,"y":280,"wires":[["f761faf035fc7a79","6d682cc6c187654f"]]},{"id":"6d682cc6c187654f","type":"SMS Output","z":"8208c83dd9c34e3a","name":"China Mobile","phone":"+8615985913245","message":"The temperature exceeds the threshold. The value is {{payload.temperature}}","x":830,"y":320,"wires":[]},{"id":"f761faf035fc7a79","type":"debug","z":"8208c83dd9c34e3a","name":"debug 1","active":true,"tosidebar":true,"console":false,"tostatus":false,"complete":"payload","targetType":"msg","statusVal":"","statusType":"auto","x":820,"y":180,"wires":[]},{"id":"59284890e5bab55e","type":"function","z":"8208c83dd9c34e3a","name":"WT101 decoder","func":"/**\n * Payload Decoder\n *\n * Copyright 2025 Milesight IoT\n *\n * @product WT101\n */\nvar RAW_VALUE = 0x00;\n\n/* eslint no-redeclare: \"off\" */\n/* eslint-disable */\n// Chirpstack v4\nfunction decodeUplink(input) {\n var decoded = milesightDeviceDecode(input.bytes);\n return { data: decoded };\n}\n\n// Chirpstack v3\nfunction Decode(fPort, bytes) {\n return milesightDeviceDecode(bytes);\n}\n\n// The Things Network\nfunction Decoder(bytes, port) {\n return milesightDeviceDecode(bytes);\n}\n/* eslint-enable */\n\nfunction milesightDeviceDecode(bytes) {\n var decoded = {};\n\n for (var i = 0; i < bytes.length;) {\n var channel_id = bytes[i++];\n var channel_type = bytes[i++];\n\n // IPSO VERSION\n if (channel_id === 0xff && channel_type === 0x01) {\n decoded.ipso_version = readProtocolVersion(bytes[i]);\n i += 1;\n }\n // HARDWARE VERSION\n else if (channel_id === 0xff && channel_type === 0x09) {\n decoded.hardware_version = readHardwareVersion(bytes.slice(i, i + 2));\n i += 2;\n }\n // FIRMWARE VERSION\n else if (channel_id === 0xff && channel_type === 0x0a) {\n decoded.firmware_version = readFirmwareVersion(bytes.slice(i, i + 2));\n i += 2;\n }\n // TSL VERSION\n else if (channel_id === 0xff && channel_type === 0xff) {\n decoded.tsl_version = readTslVersion(bytes.slice(i, i + 2));\n i += 2;\n }\n // SERIAL NUMBER\n else if (channel_id === 0xff && channel_type === 0x16) {\n decoded.sn = readSerialNumber(bytes.slice(i, i + 8));\n i += 8;\n }\n // LORAWAN CLASS TYPE\n else if (channel_id === 0xff && channel_type === 0x0f) {\n decoded.lorawan_class = readLoRaWANClass(bytes[i]);\n i += 1;\n }\n // RESET EVENT\n else if (channel_id === 0xff && channel_type === 0xfe) {\n decoded.reset_event = readResetEvent(1);\n i += 1;\n }\n // DEVICE STATUS\n else if (channel_id === 0xff && channel_type === 0x0b) {\n decoded.device_status = readDeviceStatus(1);\n i += 1;\n }\n // BATTERY\n else if (channel_id === 0x01 && channel_type === 0x75) {\n decoded.battery = readUInt8(bytes[i]);\n i += 1;\n }\n // TEMPERATURE\n else if (channel_id === 0x03 && channel_type === 0x67) {\n decoded.temperature = readInt16LE(bytes.slice(i, i + 2)) / 10;\n i += 2;\n }\n // TARGET TEMPERATURE\n else if (channel_id === 0x04 && channel_type === 0x67) {\n decoded.target_temperature = readInt16LE(bytes.slice(i, i + 2)) / 10;\n i += 2;\n }\n // VALVE OPENING\n else if (channel_id === 0x05 && channel_type === 0x92) {\n decoded.valve_opening = readUInt8(bytes[i]);\n i += 1;\n }\n // TAMPER STATUS\n else if (channel_id === 0x06 && channel_type === 0x00) {\n decoded.tamper_status = readTamperStatus(bytes[i]);\n i += 1;\n }\n // WINDOW DETECTION\n else if (channel_id === 0x07 && channel_type === 0x00) {\n decoded.window_detection = readWindowDetectionStatus(bytes[i]);\n i += 1;\n }\n // MOTOR STROKE CALIBRATION RESULT\n else if (channel_id === 0x08 && channel_type === 0xe5) {\n decoded.motor_calibration_result = readMotorCalibrationResult(bytes[i]);\n i += 1;\n }\n // MOTOR STROKE\n else if (channel_id === 0x09 && channel_type === 0x90) {\n decoded.motor_stroke = readUInt16LE(bytes.slice(i, i + 2));\n i += 2;\n }\n // FREEZE PROTECTION\n else if (channel_id === 0x0a && channel_type === 0x00) {\n decoded.freeze_protection = readFreezeProtectionStatus(bytes[i]);\n i += 1;\n }\n // MOTOR CURRENT POSITION\n else if (channel_id === 0x0b && channel_type === 0x90) {\n decoded.motor_position = readUInt16LE(bytes.slice(i, i + 2));\n i += 2;\n }\n // HEATING DATE\n else if (channel_id === 0xf9 && channel_type === 0x33) {\n decoded.heating_date = readHeatingDate(bytes.slice(i, i + 7));\n i += 7;\n }\n // HEATING SCHEDULE\n else if (channel_id === 0xf9 && channel_type === 0x34) {\n var heating_schedule = readHeatingSchedule(bytes.slice(i, i + 9));\n decoded.heating_schedule = decoded.heating_schedule || [];\n decoded.heating_schedule.push(heating_schedule);\n i += 9;\n }\n // DOWNLINK RESPONSE\n else if (channel_id === 0xfe || channel_id === 0xff) {\n var result = handle_downlink_response(channel_type, bytes, i);\n decoded = Object.assign(decoded, result.data);\n i = result.offset;\n }\n // DOWNLINK RESPONSE\n else if (channel_id === 0xf8 || channel_id === 0xf9) {\n var result = handle_downlink_response_ext(channel_id, channel_type, bytes, i);\n decoded = Object.assign(decoded, result.data);\n i = result.offset;\n } else {\n break;\n }\n }\n\n return decoded;\n}\n\nfunction handle_downlink_response(channel_type, bytes, offset) {\n var decoded = {};\n\n switch (channel_type) {\n case 0x10:\n decoded.reboot = readYesNoStatus(1);\n offset += 1;\n break;\n case 0x17:\n decoded.time_zone = readTimeZoneV1(readInt16LE(bytes.slice(offset, offset + 2)));\n offset += 2;\n break;\n case 0x25:\n decoded.child_lock_config = decoded.child_lock_config || {};\n decoded.child_lock_config.enable = readEnableStatus(bytes[offset]);\n offset += 1;\n break;\n case 0x28:\n decoded.report_status = readYesNoStatus(1);\n offset += 1;\n break;\n case 0x3b:\n decoded.time_sync_enable = readTimeSyncEnable(bytes[offset]);\n offset += 1;\n break;\n case 0x4a:\n decoded.sync_time = readYesNoStatus(1);\n offset += 1;\n break;\n case 0x57:\n decoded.restore_open_window_detection = readYesNoStatus(1);\n offset += 1;\n break;\n case 0x8e:\n // ignore the first byte\n decoded.report_interval = readUInt16LE(bytes.slice(offset + 1, offset + 3));\n offset += 3;\n break;\n case 0xae:\n decoded.temperature_control = decoded.temperature_control || {};\n decoded.temperature_control.mode = readTemperatureControlMode(bytes[offset]);\n offset += 1;\n break;\n case 0xab:\n decoded.temperature_calibration_settings = {};\n decoded.temperature_calibration_settings.enable = readEnableStatus(bytes[offset]);\n decoded.temperature_calibration_settings.calibration_value = readInt16LE(bytes.slice(offset + 1, offset + 3)) / 10;\n offset += 3;\n break;\n case 0xac:\n decoded.valve_control_algorithm = readValveControlAlgorithm(bytes[offset]);\n offset += 1;\n break;\n case 0xad:\n decoded.valve_calibration = readYesNoStatus(1);\n offset += 1;\n break;\n case 0xaf:\n decoded.open_window_detection = decoded.open_window_detection || {};\n decoded.open_window_detection.enable = readEnableStatus(bytes[offset]);\n decoded.open_window_detection.temperature_threshold = readInt8(bytes[offset + 1]) / 10;\n decoded.open_window_detection.time = readUInt16LE(bytes.slice(offset + 2, offset + 4));\n offset += 4;\n break;\n case 0xb0:\n decoded.freeze_protection_config = decoded.freeze_protection_config || {};\n decoded.freeze_protection_config.enable = readEnableStatus(bytes[offset]);\n decoded.freeze_protection_config.temperature = readInt16LE(bytes.slice(offset + 1, offset + 3)) / 10;\n offset += 3;\n break;\n case 0xb1:\n decoded.target_temperature = readInt8(bytes[offset]);\n decoded.temperature_tolerance = readUInt16LE(bytes.slice(offset + 1, offset + 3)) / 10;\n offset += 3;\n break;\n case 0xb3:\n decoded.temperature_control = decoded.temperature_control || {};\n decoded.temperature_control.enable = readEnableStatus(bytes[offset]);\n offset += 1;\n break;\n case 0xb4:\n decoded.valve_opening = readUInt8(bytes[offset]);\n offset += 1;\n break;\n case 0xba:\n decoded.dst_config = {};\n decoded.dst_config.enable = readEnableStatus(bytes[offset]);\n decoded.dst_config.offset = readInt8(bytes[offset + 1]);\n decoded.dst_config.start_month = bytes[offset + 2];\n decoded.dst_config.start_week_num = readUInt8(bytes[offset + 3]) >> 4;\n decoded.dst_config.start_week_day = bytes[offset + 3] & 0x0f;\n decoded.dst_config.start_time = readUInt16LE(bytes.slice(offset + 4, offset + 6));\n decoded.dst_config.end_month = bytes[offset + 6];\n decoded.dst_config.end_week_num = readUInt8(bytes[offset + 7]) >> 4;\n decoded.dst_config.end_week_day = bytes[offset + 7] & 0x0f;\n decoded.dst_config.end_time = readUInt16LE(bytes.slice(offset + 8, offset + 10));\n offset += 10;\n break;\n case 0xbd:\n decoded.time_zone = readTimeZone(readInt16LE(bytes.slice(offset, offset + 2)));\n offset += 2;\n break;\n case 0xc4:\n decoded.outside_temperature_control = {};\n decoded.outside_temperature_control.enable = readEnableStatus(bytes[offset]);\n decoded.outside_temperature_control.timeout = readUInt8(bytes[offset + 1]);\n offset += 2;\n break;\n case 0xf8:\n decoded.offline_control_mode = readOfflineControlMode(bytes[offset]);\n offset += 1;\n break;\n default:\n throw new Error(\"unknown downlink response\");\n }\n\n return { data: decoded, offset: offset };\n}\n\nfunction handle_downlink_response_ext(code, channel_type, bytes, offset) {\n var decoded = {};\n\n switch (channel_type) {\n case 0x33:\n decoded.heating_date = readHeatingDate(bytes.slice(offset, offset + 7));\n offset += 7;\n break;\n case 0x34:\n var heating_schedule = readHeatingSchedule(bytes.slice(offset, offset + 9));\n decoded.heating_schedule = decoded.heating_schedule || [];\n decoded.heating_schedule.push(heating_schedule);\n offset += 9;\n break;\n case 0x35:\n decoded.target_temperature_range = {};\n decoded.target_temperature_range.min = readInt8(bytes[offset]);\n decoded.target_temperature_range.max = readInt8(bytes[offset + 1]);\n offset += 2;\n break;\n case 0x36:\n decoded.display_ambient_temperature = readEnableStatus(bytes[offset]);\n offset += 1;\n break;\n case 0x37:\n decoded.window_detection_valve_strategy = readWindowDetectionValveStrategy(bytes[offset]);\n offset += 1;\n break;\n case 0x38:\n decoded.effective_stroke = {};\n decoded.effective_stroke.enable = readEnableStatus(bytes[offset]);\n decoded.effective_stroke.rate = readUInt8(bytes[offset + 1]);\n offset += 2;\n break;\n case 0x3a:\n decoded.change_report_enable = readEnableStatus(bytes[offset]);\n offset += 1;\n break;\n default:\n throw new Error(\"unknown downlink response\");\n }\n\n if (hasResultFlag(code)) {\n var result_value = readUInt8(bytes[offset]);\n offset += 1;\n\n if (result_value !== 0) {\n var request = decoded;\n decoded = {};\n decoded.device_response_result = {};\n decoded.device_response_result.channel_type = channel_type;\n decoded.device_response_result.result = readResultStatus(result_value);\n decoded.device_response_result.request = request;\n }\n }\n\n return { data: decoded, offset: offset };\n}\n\nfunction hasResultFlag(code) {\n return code === 0xf8;\n}\n\nfunction readResultStatus(status) {\n var status_map = { 0: \"success\", 1: \"forbidden\", 2: \"invalid parameter\" };\n return getValue(status_map, status);\n}\n\nfunction readProtocolVersion(bytes) {\n var major = (bytes & 0xf0) >> 4;\n var minor = bytes & 0x0f;\n return \"v\" + major + \".\" + minor;\n}\n\nfunction readHardwareVersion(bytes) {\n var major = (bytes[0] & 0xff).toString(16);\n var minor = (bytes[1] & 0xff) >> 4;\n return \"v\" + major + \".\" + minor;\n}\n\nfunction readFirmwareVersion(bytes) {\n var major = (bytes[0] & 0xff).toString(16);\n var minor = (bytes[1] & 0xff).toString(16);\n return \"v\" + major + \".\" + minor;\n}\n\nfunction readTslVersion(bytes) {\n var major = bytes[0] & 0xff;\n var minor = bytes[1] & 0xff;\n return \"v\" + major + \".\" + minor;\n}\n\nfunction readSerialNumber(bytes) {\n var temp = [];\n for (var idx = 0; idx < bytes.length; idx++) {\n temp.push((\"0\" + (bytes[idx] & 0xff).toString(16)).slice(-2));\n }\n return temp.join(\"\");\n}\n\nfunction readLoRaWANClass(type) {\n var class_map = {\n 0: \"Class A\",\n 1: \"Class B\",\n 2: \"Class C\",\n 3: \"Class CtoB\",\n };\n return getValue(class_map, type);\n}\n\nfunction readResetEvent(status) {\n var status_map = { 0: \"normal\", 1: \"reset\" };\n return getValue(status_map, status);\n}\n\nfunction readDeviceStatus(status) {\n var status_map = { 0: \"off\", 1: \"on\" };\n return getValue(status_map, status);\n}\n\nfunction readTamperStatus(type) {\n var tamper_status_map = { 0: \"installed\", 1: \"uninstalled\" };\n return getValue(tamper_status_map, type);\n}\n\nfunction readWindowDetectionStatus(type) {\n var window_detection_status_map = { 0: \"normal\", 1: \"open\" };\n return getValue(window_detection_status_map, type);\n}\n\nfunction readMotorCalibrationResult(type) {\n var motor_calibration_result_map = {\n 0: \"success\",\n 1: \"fail: out of range\",\n 2: \"fail: uninstalled\",\n 3: \"calibration cleared\",\n 4: \"temperature control disabled\",\n };\n return getValue(motor_calibration_result_map, type);\n}\n\nfunction readFreezeProtectionStatus(type) {\n var freeze_protection_status_map = {\n 0: \"normal\",\n 1: \"triggered\",\n };\n return getValue(freeze_protection_status_map, type);\n}\n\nfunction readHeatingDate(bytes) {\n var heating_date = {};\n var offset = 0;\n heating_date.enable = readEnableStatus(bytes[offset]);\n heating_date.report_interval = readUInt16LE(bytes.slice(offset + 1, offset + 3));\n heating_date.start_month = bytes[offset + 3];\n heating_date.start_day = readUInt8(bytes[offset + 4]);\n heating_date.end_month = bytes[offset + 5];\n heating_date.end_day = readUInt8(bytes[offset + 6]);\n return heating_date;\n}\n\nfunction readHeatingSchedule(bytes) {\n var heating_schedule = {};\n var offset = 0;\n heating_schedule.index = readUInt8(bytes[offset]) + 1;\n heating_schedule.enable = readEnableStatus(bytes[offset + 1]);\n heating_schedule.temperature_control_mode = readTemperatureControlMode(bytes[offset + 2]);\n heating_schedule.value = readUInt8(bytes[offset + 3]);\n heating_schedule.report_interval = readUInt16LE(bytes.slice(offset + 4, offset + 6));\n heating_schedule.execute_time = readUInt16LE(bytes.slice(offset + 6, offset + 8));\n var day = readUInt8(bytes[offset + 8]);\n heating_schedule.week_recycle = {};\n var week_day_offset = { monday: 1, tuesday: 2, wednesday: 3, thursday: 4, friday: 5, saturday: 6, sunday: 7 };\n for (var key in week_day_offset) {\n heating_schedule.week_recycle[key] = readEnableStatus((day >>> week_day_offset[key]) & 0x01);\n }\n\n return heating_schedule;\n}\n\nfunction readYesNoStatus(type) {\n var yes_no_map = { 0: \"no\", 1: \"yes\" };\n return getValue(yes_no_map, type);\n}\n\nfunction readEnableStatus(type) {\n var status_map = { 0: \"disable\", 1: \"enable\" };\n return getValue(status_map, type);\n}\n\nfunction readTemperatureControlMode(type) {\n var temperature_control_mode_map = { 0: \"auto\", 1: \"manual\" };\n return getValue(temperature_control_mode_map, type);\n}\n\nfunction readTimeZoneV1(time_zone) {\n var timezone_map = { \"-120\": \"UTC-12\", \"-110\": \"UTC-11\", \"-100\": \"UTC-10\", \"-95\": \"UTC-9:30\", \"-90\": \"UTC-9\", \"-80\": \"UTC-8\", \"-70\": \"UTC-7\", \"-60\": \"UTC-6\", \"-50\": \"UTC-5\", \"-40\": \"UTC-4\", \"-35\": \"UTC-3:30\", \"-30\": \"UTC-3\", \"-20\": \"UTC-2\", \"-10\": \"UTC-1\", 0: \"UTC\", 10: \"UTC+1\", 20: \"UTC+2\", 30: \"UTC+3\", 35: \"UTC+3:30\", 40: \"UTC+4\", 45: \"UTC+4:30\", 50: \"UTC+5\", 55: \"UTC+5:30\", 57: \"UTC+5:45\", 60: \"UTC+6\", 65: \"UTC+6:30\", 70: \"UTC+7\", 80: \"UTC+8\", 90: \"UTC+9\", 95: \"UTC+9:30\", 100: \"UTC+10\", 105: \"UTC+10:30\", 110: \"UTC+11\", 120: \"UTC+12\", 127: \"UTC+12:45\", 130: \"UTC+13\", 140: \"UTC+14\" };\n return getValue(timezone_map, time_zone);\n}\n\nfunction readTimeZone(time_zone) {\n var timezone_map = { \"-720\": \"UTC-12\", \"-660\": \"UTC-11\", \"-600\": \"UTC-10\", \"-570\": \"UTC-9:30\", \"-540\": \"UTC-9\", \"-480\": \"UTC-8\", \"-420\": \"UTC-7\", \"-360\": \"UTC-6\", \"-300\": \"UTC-5\", \"-240\": \"UTC-4\", \"-210\": \"UTC-3:30\", \"-180\": \"UTC-3\", \"-120\": \"UTC-2\", \"-60\": \"UTC-1\", 0: \"UTC\", 60: \"UTC+1\", 120: \"UTC+2\", 180: \"UTC+3\", 210: \"UTC+3:30\", 240: \"UTC+4\", 270: \"UTC+4:30\", 300: \"UTC+5\", 330: \"UTC+5:30\", 345: \"UTC+5:45\", 360: \"UTC+6\", 390: \"UTC+6:30\", 420: \"UTC+7\", 480: \"UTC+8\", 540: \"UTC+9\", 570: \"UTC+9:30\", 600: \"UTC+10\", 630: \"UTC+10:30\", 660: \"UTC+11\", 720: \"UTC+12\", 765: \"UTC+12:45\", 780: \"UTC+13\", 840: \"UTC+14\" };\n return getValue(timezone_map, time_zone);\n}\n\nfunction readTimeSyncEnable(type) {\n var enable_map = { 0: \"disable\", 2: \"enable\" };\n return getValue(enable_map, type);\n}\n\nfunction readValveControlAlgorithm(type) {\n var valve_control_algorithm_map = { 0: \"rate\", 1: \"pid\" };\n return getValue(valve_control_algorithm_map, type);\n}\n\nfunction readOfflineControlMode(type) {\n var offline_control_mode_map = { 0: \"keep\", 1: \"embedded temperature control\", 2: \"off\" };\n return getValue(offline_control_mode_map, type);\n}\n\nfunction readWindowDetectionValveStrategy(type) {\n var window_detection_valve_strategy_map = { 0: \"keep\", 1: \"close\" };\n return getValue(window_detection_valve_strategy_map, type);\n}\n\nfunction readUInt8(bytes) {\n return bytes & 0xff;\n}\n\nfunction readInt8(bytes) {\n var ref = readUInt8(bytes);\n return ref > 0x7f ? ref - 0x100 : ref;\n}\n\nfunction readUInt16LE(bytes) {\n var value = (bytes[1] << 8) + bytes[0];\n return value & 0xffff;\n}\n\nfunction readInt16LE(bytes) {\n var ref = readUInt16LE(bytes);\n return ref > 0x7fff ? ref - 0x10000 : ref;\n}\n\nfunction getValue(map, key) {\n if (RAW_VALUE) return key;\n\n var value = map[key];\n if (!value) value = \"unknown\";\n return value;\n}\n\nif (!Object.assign) {\n Object.defineProperty(Object, \"assign\", {\n enumerable: false,\n configurable: true,\n writable: true,\n value: function (target) {\n \"use strict\";\n if (target == null) {\n throw new TypeError(\"Cannot convert first argument to object\");\n }\n\n var to = Object(target);\n for (var i = 1; i < arguments.length; i++) {\n var nextSource = arguments[i];\n if (nextSource == null) {\n continue;\n }\n nextSource = Object(nextSource);\n\n var keysArray = Object.keys(Object(nextSource));\n for (var nextIndex = 0, len = keysArray.length; nextIndex < len; nextIndex++) {\n var nextKey = keysArray[nextIndex];\n var desc = Object.getOwnPropertyDescriptor(nextSource, nextKey);\n if (desc !== undefined && desc.enumerable) {\n // concat array\n if (Array.isArray(to[nextKey]) && Array.isArray(nextSource[nextKey])) {\n to[nextKey] = to[nextKey].concat(nextSource[nextKey]);\n } else {\n to[nextKey] = nextSource[nextKey];\n }\n }\n }\n }\n return to;\n },\n });\n}\n\nvar buffer = Buffer.from(msg.payload, 'base64');\nvar aa = Decoder(buffer);\nmsg.payload = aa;\nmsg.buffer = buffer;\nreturn msg;","outputs":1,"noerr":49,"initialize":"","finalize":"","libs":[],"x":440,"y":280,"wires":[["1a4677d654fcebcf"]]}](1) LoRa入力: ネットワークサーバー内のセンサーから全アップリンクメッセージを取得します。
(2) Device Filter: Device EUI によるフィルタリング。ここでは WT101 をそのデバイス EUI でフィルタリングするよう設定します。

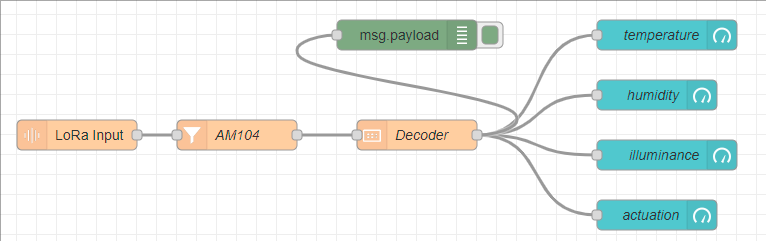
(3) Fuction node: WT101 が報告する 16 進データを、以下のドキュメントに従って可読な JSON データに変換してください。
https://github.com/Milesight-IoT/SensorDecoders/blob/main/wt-series/wt101/wt101-decoder.js


(4) スイッチ:判定条件(If…)の設定に使用します。
デコーダーコード内のその他のMilesightセンサーパラメータ情報は、https://github.com/Milesight-IoT/SensorDecoders から取得できます。
設定例は、温度が25℃を超えるときにトリガーされます。
(5) デバッグ: デバッグサイドバータブで選択したメッセージプロパティを表示し、必要に応じて実行時ログも表示します。ここではセンサーアップリンクパッケージの内容を確認するために使用し、出力はデフォルトでペイロードのままにします。

(6) SMS出力: テキストメッセージの出力設定です。「電話番号」にアラーム受信先の電話番号を追加し、実際の出力値は{{}}で囲む必要があります。


ステップ5: デプロイと結果確認
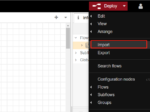
1. 「Deploy」をクリックし、Node-REDの設定をすべて保存します。

2. SMSを確認します。指定した閾値を超過すると、ゲートウェイがSMSアラームを送信します。

SMSを確認します。指定した閾値を超過すると、ゲートウェイがSMSアラームを送信します。

——-以上—–